Few days ago I’ve bought 2WD Smart Robot Car Kit For ESP8266 ESP-12E D1 Wifi Board For Arduino Control by Mobile Ultrasonic Module .
Here is the step by step assembly. Setting up the developement environment and deploying will be subject of another posts.
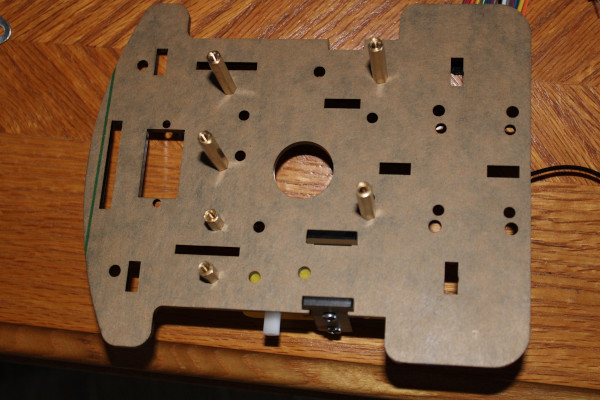

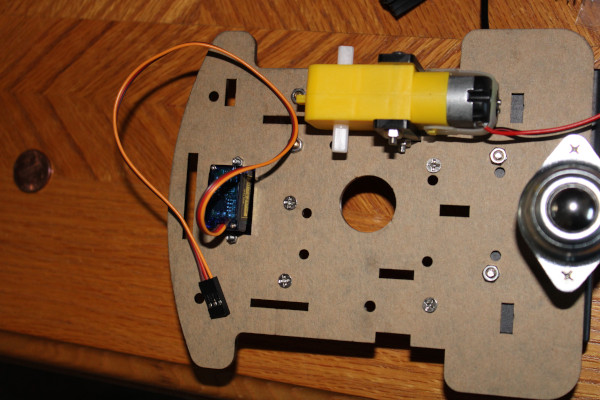
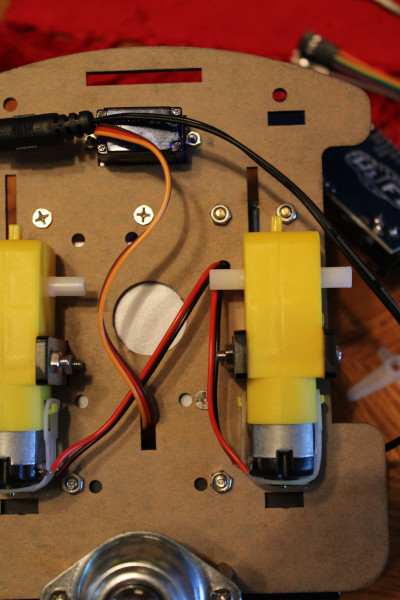
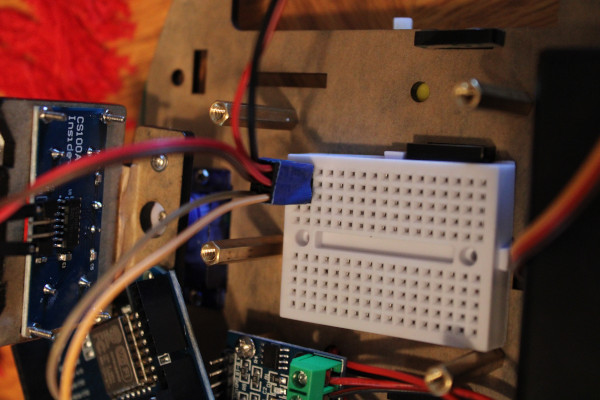
Note: do not use the large round hole, but the narrow rectangular hole near the bottom wheel. The breadboard will need to be installed above it.
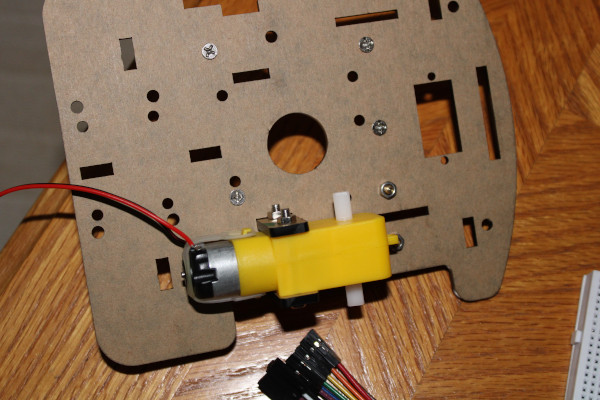
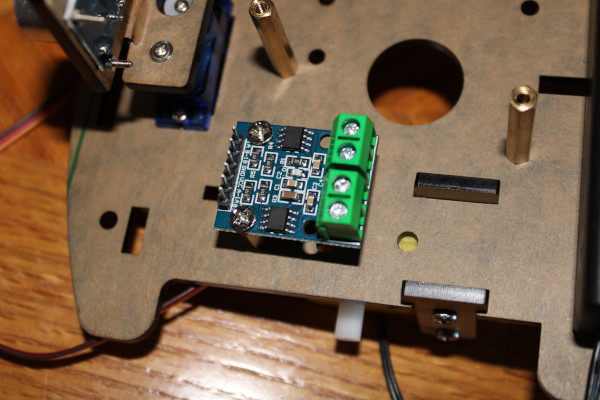
Polarity of the wires is essential. Otherwise it will either not work or it will reverse the direction of the affected motor.
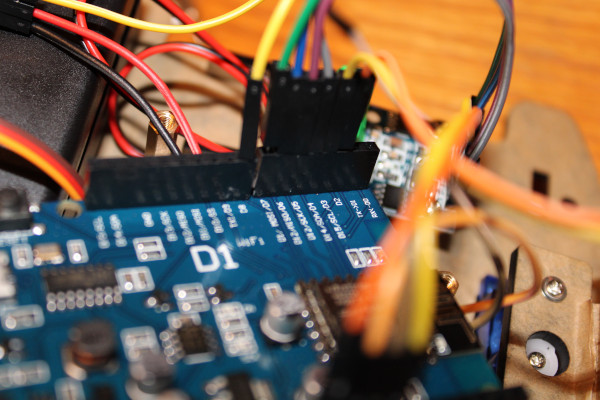
I’ve taped together all adjacent connectors, will have to worry less about one connector leaving its place.
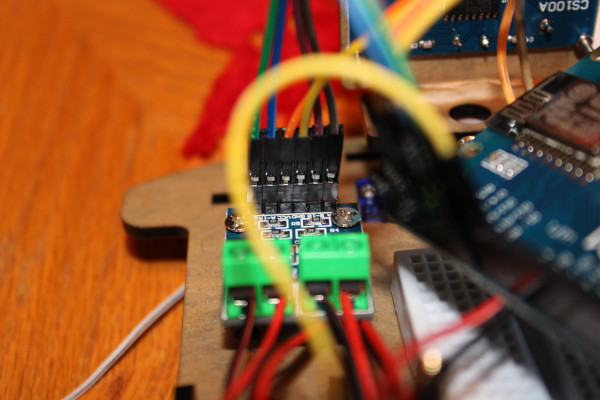
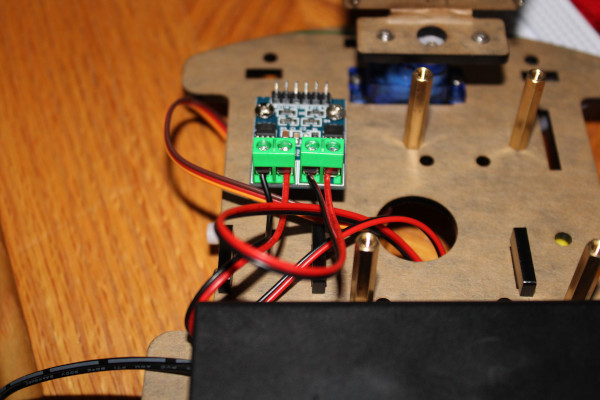
Disregard my layout of colors. I’ve figured out I’ve connected a few of them wrong; you can debug upon deploying the software to the board. Only meed to make sure the power cables are right, I won’t risk applying power to the wrong terminals or causing a shortcircuit of the battery.
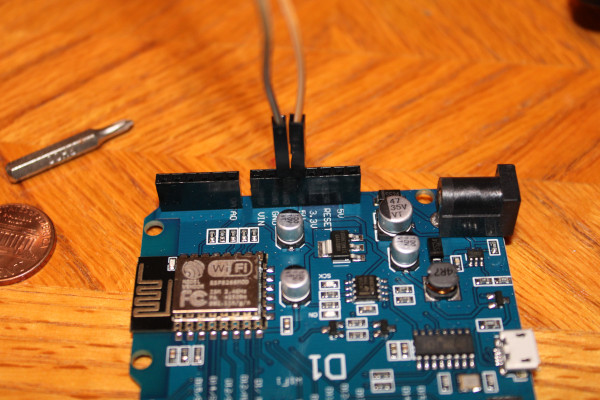
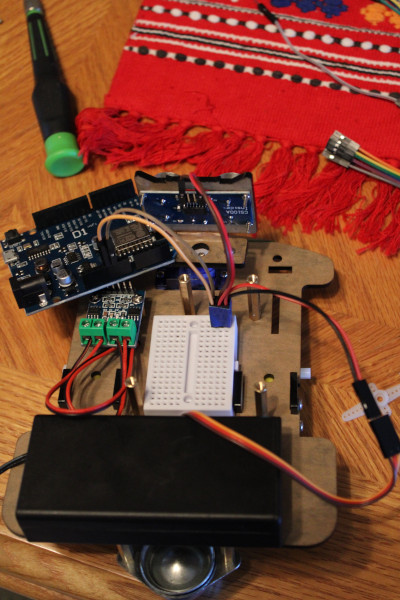
Once you are done with wiring, the vehicle is ready for the software upload.
No batteries are required for testing. Make sure that the vehicle is immobilized, the wheels don’t touch the table.
To start testing, connect the micro USB 2 cable (included) to the Arduino card and your PC.